

В настоящее время инерциальные датчики и инерциальные системы (микроэлектромеханические системы, MEMS) стали незаменимым направлением развития навигационных технологий будущего. Технология MEMS получила широкое распространение благодаря своим преимуществам, таким как небольшие размеры, малый вес, низкое энергопотребление, низкая стоимость и ударопрочность. В настоящее время разработка инерциальной технологии MEMS находится на относительно высоком уровне. Она представляет собой комбинированную систему со вспомогательными системами, такими как гироскопы и акселерометры, которые могут обеспечить подходящие решения для большинства навигационных приложений. Инерциальные измерительные устройства, разработанные Ericco, подразделяются на MEMS IMU и FOG IMU. Инерциальные измерительные устройства MEMS подразделяются на тактические и навигационные. Навигационные IMU могут самостоятельно определять направление на север, в то время как инерциальные измерительные устройства тактического уровня могут полагаться на магнитометры или GNSS для определения направления на север. Нижеследующее будет разделено на две части: ознакомление с принципом работы инерциального измерительного устройства и представление IMU тактического уровня от ERICCO.

Как работает инерциальный измерительный блок MEMS:
Инерциальный измерительный блок - это устройство, которое измеряет угол ориентации (или угловую скорость) и ускорение объекта по трем осям. Как правило, инерциальный измерительный блок содержит три одноосевых акселерометра и три одноосевых гироскопа. Акселерометр регистрирует сигналы ускорения объекта по трем независимым осям несущей системы координат, в то время как гироскоп регистрирует сигнал угловой скорости носителя относительно навигационной системы координат. Измерьте угловую скорость и ускорение объекта в трехмерном пространстве и используйте это для расчета положения объекта. Это имеет очень важное прикладное значение в навигации.IMU в основном используются в оборудовании, требующем управления движением, например, в автомобилях и роботах. Они также используются в ситуациях, когда требуется точный расчет перемещения с использованием ориентации, например, в инерциальном навигационном оборудовании для подводных лодок, самолетов, ракет и космических аппаратов.
Принцип действия инерциального измерительного прибора очень похож на выполнение небольших шагов в темноте. В темноте, из-за разницы между вашей оценкой длины шага и фактическим пройденным расстоянием, по мере того, как вы будете делать все больше и больше шагов, разница между вашим предполагаемым положением и фактическим положением будет становиться все больше и больше. При выполнении первого шага предполагаемое положение относительно близко к фактическому;но по мере увеличения количества шагов разница между расчетным положением и фактическим положением становится все больше и больше. Этот метод расширен до трех измерений, что является принципом инерциальной единицы измерения.
Академическое выражение таково: на основе законов механики Ньютона, измеряя ускорение носителя в инерциальной системе отсчета, интегрируя его во времени и преобразуя в навигационную систему координат, можно получить скорость в навигационной системе координат. , угол рыскания и информацию о местоположении.
Таким образом, с точки зрения непрофессионала, инерциальный измерительный блок представляет собой бесплатформенную инерциальную навигационную систему. Система состоит из трех датчиков ускорения и трех датчиков угловой скорости (гироскопов). Акселерометр используется для определения составляющей ускорения относительно вертикальной линии земли. Датчик скорости используется для получения информации об угле поворота.
Стоит отметить, что инерциальный измерительный прибор предоставляет информацию об относительном местоположении. Его функция заключается в измерении маршрута перемещения объекта относительно начальной точки, поэтому он не может предоставить информацию о вашем конкретном местоположении. Поэтому его часто комбинируют с GPS. При совместном использовании, когда сигнал GPS в определенных местах слаб, IMU может играть свою роль, позволяя автомобилю продолжать получать абсолютную информацию о местоположении и не "заблудиться".
ERICCO универмаг инерциальных измерений тактического класса
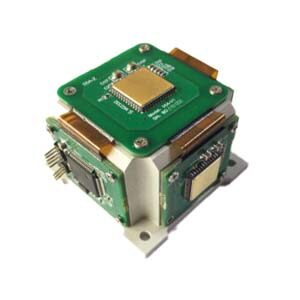
Далее мы в основном познакомимся с новым инерциальным измерительным прибором - инерциальным измерительным прибором тактического класса ERICCO INERTIAL SYSTEM: ER-MIMU03 (Высокоточный MEMS IMU для навигации и стабильного управления).
ERICCO выпускает инерциальный измерительный прибор тактического класса (IMU): В ER-MIMU03 используются высококачественные и надежные MEMS-акселерометры и гироскопы. Оснащенный трехосевым прецизионным гироскопом X, Y, Z, трехосевым акселерометром X, Y, Z, с высоким разрешением, он может выводить исходное шестнадцатеричное дополнение к трехосевому гироскопу X, Y, Z и акселерометру с помощью кодовых данных RS422 (включая шестнадцатеричное дополнение к гироскопу), числовую температуру, угол, шестнадцатеричная температура акселерометра, шестнадцатеричное дополнение к ускорению); он также может выводить данные гироскопа и акселерометра, которые были обработаны с помощью базовых вычислений с плавающей запятой безразмерного значения). IMU оснащен встроенным датчиком ускорения и гироскопом, которые могут измерять линейное ускорение и угловую скорость вращения в трех направлениях и получать информацию об ориентации, скорости и перемещении носителя путем анализа. Применение этого IMU тактического класса включает в себя измерение азимута, ориентации, местоположения и техническое обслуживание в INS с поддержкой GNSS. Измерение курса, тангажа, крена в беспилотных летательных аппаратах AHRS для управления роботами и автономных машин, стабилизации направления беспилотных летательных аппаратов и наведения спутниковой антенны для управления, наведения системы слежения за целью, навигации и контроля ориентации, а также ориентации IMU в тактических системах вооружения MEMS Поддерживается и позиционируется азимутальный угол. Исследование перемещений и техническое обслуживание в MRU и других областях применения.
Высокоточная навигация/стабильное управление MEMS IMU объединяет трехосевой MEMS-акселерометр и трехосевой MEMS-гироскоп в уникальной конструкции с резервированием, что позволяет добиться максимальной производительности при одновременном уменьшении размеров устройства.
Что касается технических характеристик, то MEMS IMU для высокоточной навигации и стабильного управления оснащен превосходными гироскопом и акселерометром. Нестабильность смещения гироскопа составляет 0,3°/ч. Обеспечивает долговременный точный расчет и сохраняет отличные характеристики курса. Датчик MEMS в ER-MIMU03 имеет чрезвычайно низкие погрешности коррекции вибрации и способен выдерживать высокую вибрацию до 6,06 g.
При очень низкой нестабильности смещения гироскопа навигационные характеристики высокоточного MEMS IMU для навигации и стабильного управления могут быть хорошими при наличии помех в работе GNSS или отсутствии сигнала. Этот IMU тактического класса обладает относительно высокой точностью по сравнению с IMU тактического класса от других аналогичных компаний. Если вы хотите приобрести наш IMU, пожалуйста, свяжитесь с нашим соответствующим персоналом.