

MEMS-гироскоп - это разновидность твердотельного волнового гироскопа, который обычно обрабатывается по технологии микро- и нанопроизводства и обладает такими характеристиками, как малый объем, высокая производительность, низкое энергопотребление и масса. С момента появления в 1975 году первого в мире гироскопа с полусферическим резонатором топология генератора гармонических колебаний MEMS-гироскопа претерпела эволюцию от трехмерной структуры к двумерной. В этой статье мы расскажем о разработке MEMS-гироскопов, а далее будет рассказано о разработке различных гироскопов и MEMS-гироскопок.
Разработка различных гироскопов
Инерциальная технология - это технология непрерывного получения информации о движении без помех в режиме реального времени. Гироскоп является одним из основных компонентов инерциальной навигационной системы, который может использоваться для измерения угла движения или угловой скорости объекта. В соответствии с принципом работы обычные гироскопы можно разделить на роторные гироскопы, основанные на неподвижной оси и прецессии вращающейся массы, оптические гироскопы, основанные на оптических эффектах, вибрационные гироскопы, основанные на действии силы Кориолиса, и атомные гироскопы, основанные на волнах материи.
Традиционный механический роторный гироскоп был разработан раньше всех, и его теоретическая технология является наиболее совершенной, но он большой, дорогой и имеет короткий срок службы. Точность оптического гироскопа высока, особенно точность лазерного гироскопа, который может достигать инерционного уровня, но его объем велик, производственный процесс сложен, а стоимость производства высока. Атомный гироскоп - это новая технология создания гироскопов, появившаяся в последние годы. Его преимущества заключаются в небольших размерах, низком энергопотреблении, высокой помехозащищенности и, как ожидается, высокой точности определения инерционного уровня. По сравнению с другими видами гироскопов микрорезонансные гироскопы обладают такими преимуществами, как небольшие размеры, низкое энергопотребление, низкая стоимость, простота интеграции и т.д., и широко используются в аэрокосмической промышленности, бытовой электронике, навигации и наведении.
В соответствии с топологической структурой генератора гармонических колебаний микромеханический вибрационный гироскоп можно разделить на полусферический микрогироскоп, цилиндрический микрогироскоп, кольцевой микрогироскоп и массовый блочный микрогироскоп. С развитием технологии микроэлектромеханических систем (MEMS) традиционная технология микрообработки в значительной степени способствовала разработке вибрирующего гироскопа MEMS. В соответствии с различными методами обработки, общую технологию обработки микрорезонаторного гироскопа можно разделить на трехмерную технологию обработки и плоскостную технологию обработки. С развитием технологий обработки материалов материалы для микрорезонансного гироскопа становятся все более разнообразными, среди которых монокристаллический кремний, плавленый кварц, алмаз, поликремний, диоксид кремния и другие материалы становятся объектом исследований в различных странах.
История разработки MEMS-гироскопа
Несмотря на то, что кольцевой MEMS-гироскоп обладает лучшей производительностью и более простым методом обработки, его производительность ограничена более высоким угловым случайным блужданием из-за меньшей модальной массы, меньшего углового усиления и меньшего времени отключения. Поскольку геометрия плоского MEMS-гиродатчика определяется этапами литографии во время механической обработки без необходимости сборки и центровки, возможно проектировать сложные механические конструкции с множеством движущихся частей для достижения недорогостоящего массового производства, симметрии жесткости и демпфирования, коэффициента качества более 1 миллиона и кольцевого соединения.время простоя более нескольких минут. Четырехмассовый MEMS-гироскоп имеет полностью симметричную конструкцию и режим работы, которые могут соответствовать вышеуказанным критериям. Угловое усиление режима работы четырехмассового MEMS-гироскопа составляет 0,75, что близко к теоретическому значению 1. Для кольцевого микрогироскопа угловое усиление в режиме n=2 составляет около 0,37, а угловое усиление в режиме n=3 составляет всего около 0,17. Четырехмассовый MEMS-гироскоп - это плоский микромеханический гироскоп с самым высоким пределом производительности, о котором сообщалось в настоящее время.
В 2010 году Калифорнийский университет в Ирвайне предложил полностью симметричную конструкцию четырехмассового микрогироскопа, как показано на рисунке 1. Подобно двухмассовому микрогироскопу, механическая структура четырехмассового микрогироскопа состоит из четырех идентичных симметричных несвязанных блоков массы, пары противофазных синхронных рычажных механизмов для управления режимы управления и обнаружения, а также изогнутая балка между линейно соединенными зубьями.Архитектура блочного микрогироскопа с четырьмя массами основана на двухмассовой конструкции, и его можно рассматривать как двухрычажный камертонный гироскоп с двумя массами, с дополнительными линейно изогнутыми лучами и инвертирующими рычажными механизмами. Благодаря симметричности устройства, режим движения и режим обнаружения симметричны, и может быть достигнуто измерение полного угла наклона. В последующие годы институт провел множество исследований по теоретическому проектированию, технологии упаковки, теории управления и контролю полного угла наклона четырехмассового микрогироскопа. В настоящее время коэффициент качества гироскопа этой конструкции был увеличен с первоначальных 640 000 до более чем 2 миллионов, стабильность нулевого смещения достигла 0,065 (°)/ч, а угловое случайное блуждание составляет 0,0058 (°)/√ч, что свидетельствует о способности инерциального уровня навигация.

Рис. 1. Четырехмассовый микрообрабатывающий гироскоп
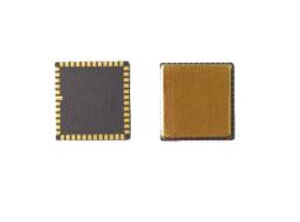
В 2016 году Тахери-Техрани и др. разработан четырехмассовый микрогироскоп в эпитаксиальном корпусе размером всего 2 мм×2 мм, что составляет всего 1/16 от размера прототипа четырехмассового микрогироскопа, предложенного ранее, как показано на рисунке 2. Конструкция имеет коэффициент качества около 85000 и в сочетании с замкнутым контуром регулирования амплитуды и схемами ортогональной компенсации позволяет достичь углового случайного блуждания 0,42×10-3 (°)/с/Гц.
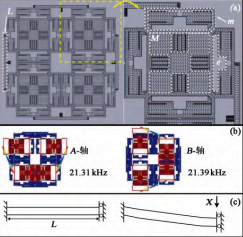
Рис. 2. Четырехмассовый микрогироскоп в эпитаксиальном корпусе
В 2016 году Университет Цинхуа предложил конструкцию центросимметричного четырехмассового гармонического генератора (CSQMG). CSQMG состоит из четырех распределенных по окружности блоков массы, соединенных Y-образными балками. Центр тяжести всего механизма находится в самом центре конструкции и поддерживается центральной точкой крепления. Каждый массовый блок оснащен четырьмя электродами для управления, обнаружения и регулировки. Впоследствии были изучены оптимизация параметров конструкции, динамическое моделирование и анализ, управление параметрами и другие технологии, и были достигнуты хорошие результаты.
В 2018 году Научно-исследовательский институт аэрокосмической промышленности по управлению полетом Си'Ань предложил четырехмассовый микрогироскоп с кольцевым распределением массы. Центром конструкции является кольцевая балка, четыре блока массы распределены вдоль кольцевой балки и соединены друг с другом посредством кольцевой балки. Каждый массовый блок содержит приводную рамку, блок сосредоточенной массы и детекторную рамку. Благодаря полностью симметричной конструкции можно выполнять дифференциальное детектирование. Добротность конструкции составляет 200 000, а стабильность нулевого смещения составляет более 4 (°) в час.
В 2018 году Сингапурский институт микроэлектроники предложил четырехмассовый микрогироскоп с симметричной структурой. Как показано на рисунке 3, конструкция состоит из четырех идентичных блоков массы, которые соединены центральной пружиной и четырьмя коническими стержнями. Гироскоп использует синхронный режим обратного управления и дифференциальное обнаружение, что позволяет в значительной степени уменьшить синфазный сигнал, вызванный ускорением и вибрацией.
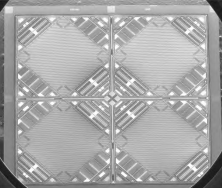
Рис. 3. Четырехмассовый микрогироскоп с симметричной структурой
В 2020 году Шанхайский университет Цзяо Тонг предложил новую конструкцию четырехмассового микрогироскопа с несвязанной конструкцией. Как показано на рисунке 4, в конструкции используется конструкция гребенчатого электрода и двухтактный метод для устранения двухчастотной составляющей электростатической движущей силы, а структура сложенного пучка моделируется, анализируется и оптимизируется, и идеальный эффект развязки достигается за счет конструкции с двумя степенями свободы.
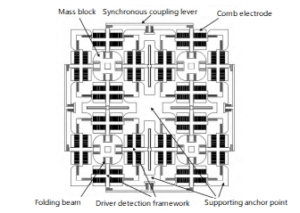
Рисунок 4. Четырехмассовый микрогироскоп Шанхайского университета Цзяо Тонг
Вывод
В этой статье перечисляются преимущества и недостатки различных типов гироскопов и основное внимание уделяется состоянию разработки четырехмассовых MEMS-гироскопов. По сравнению с кольцевыми гироскопами, четырехмассовые микрогироскопы обладают более высоким угловым коэффициентом усиления и модальной массой, поэтому у них меньше угловых случайных блужданий. В последние годы их полностью симметричная конструкция стала предметом исследований.
Являясь участником отдела исследований и разработок массового MEMS-гироскопа, компания Ericco провела углубленные исследования в области MEMS-технологий и разработала ряд высокопроизводительных MEMS-гироскопов. Например, ER-MG2-50/100 - это MEMS-гироскоп навигационного класса для определения направления на север с угловой скоростью 0,0025-0,005°/√час. ER-MG-067 также является высокоэффективным MEMS-гироскопом, но это гироскоп тактического класса, и угловая скорость случайного блуждания может достигать <0,125 °/√ ч. Аналогичным образом, отдельные массивные блоки гироскопов могут также образовывать двух- и трехосевые MEMS-гироскопы, такие как ER-2MG-02 и ER-3MG-06, которые являются высокоэффективными двух- и трехосевыми гироскопами.
Если вам интересно узнать больше о MEMS gyro, пожалуйста, свяжитесь с нами.